Equine Lameness
Biomechanics
Veterinary Biomechanics Summary (Vic Cox)- optional reading
Statics vs. Dynamics
Statics refers to stationary support, dynamics refers to movement. Most muscle tendon systems serve both functions. Static analysis of material strength is commonly done by civil and mechanical engineers and has been applied to biological materials such as bone and tendon. The properties usually measured are:
- compressive strength – how much force must be exerted to crush the test material
- tensile strength – how much force must be exerted to pull the material apart
- shear strength – how much force must be applied in offset directions to cause a material to split in half (to shear)
Kinesiology
Muscle types
Antigravity muscles serve both static and dynamic functions. The antigravity muscles include:
- Extensors of proximal joints
- The quadriceps muscle, for example, prevents collapse of the stifle joint during standing but extension of the stifle joint contributes to thrust during movement.
- Digital flexors
- These muscles support the fetlock. When these tendons are stretched due to overexertion downward translation of the fetlock will occur, and if severe can result in fracture of the proximal sesamoids.
- Lift the leg off the ground so that it can be swung forward during the protraction phase of the stride. The faster the gait the greater degree of flexion to reduce angular mass by keeping the mass close to the pivot point.
- Withdrawal of the limb from noxious (harmful) stimuli.
Limb movement terminology
Velocity = stride length X stride frequency.
Stride length is determined by:
- Length of limb – digitigrade and unguligrade modifications increase limb length.
- Pivot point modification – movable shoulder with pivot point at caudal angle of scapula (serrated face) allows the limb to reach forward farther.
- Unsupported intervals – the animal is momentarily flying through the air. Usually two such intervals occur per stride of carnivores but only one in the case of ungulates.
- Foot fall pattern – each foot individually propels the body forward. The more the limbs act independently, the greater the effect of each. When foot falls are close together their separate effects are lost as they are merged together. Close footfalls have a large overlap time. Smaller overlap time was correlated with longer stride length in a cinefilm analysis of Secretariat.
- Contraction rate of muscles – generally smaller animals have more rapidly contracting muscles due to a higher metabolic rate.
- Gear ratio – like a motor vehicle, the low gear muscles deliver power while the high gear muscles deliver speed. Both types work together to provide an optimal balance of speed and power. There are various anatomical arrangements of lever arms and the pivot points (fulcrum). The output force is the ratio of the input force times the length ratio of the lever arms. The same is true of the output velocity except that the lever ratio is reversed (reciprocal). This makes intuitive sense because force (or power) must be sacrificed to get speed.
- Angular mass (moment of inertia). This corresponds to mass in rectilinear motion, that is, it resists acceleration. As the speed of equine gaits increases, the limbs are flexed more in the protraction (advancing) phase. Flexion reduces the effective length of the limb and thereby angular mass is reduced. Angular mass is the product of mass times effective length squared.
Center of gravity
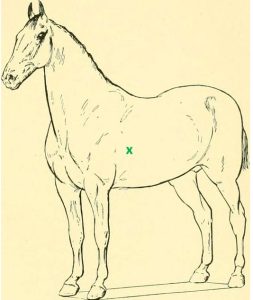
The center of gravity in the stationary horse is cranial to the intersection of diagonals drawn from forelimbs to opposite hind limbs. This is because the cranial part of the body is heavier.
Head position – the center of gravity shifts forward as the head is lowered and extended forward. It is shifted caudally when the head is raised because raising the head also makes the center of gravity more caudal.
- Head is lowered before kicking – this shifts the center of gravity forward so that the body is more stable.

- Head nod up when painful fore foot hits – this tends to shift center of gravity back off of the painful forelimb. The often quoted rule in the clinic is “down on sound” meaning the head goes down when the normal foot hits but up when the lame foot hits.
